Arkadaslar ,bilgisayardan kontrollü yatay yonde sag sol hareket edebilen , 2 step motor lu webcam projemde bi sorun war ,1 step motorlu bir proje olsaydı,step motorundan gelen baglantıyı porttaki hangi cikislara takıcagımı biliyordum ama paralel port ta 2 step motor yer alacagı icin bu portun hangi girişine takcaz step motorundan gelen baglantıyı,bi protta 20-30 tane giriş var bana bu konuda yardımcı olacak babayigit varmı,
yardımcı olacak arkadaslar born_elbruz@hotmail.com msn adresimi ekleyebilirlerse yada 05065075394 numaram , cok makbule gecer arkadaslar ,bu benim icin karsılıksız bırakılmıcak bir yardım olur Saygılar
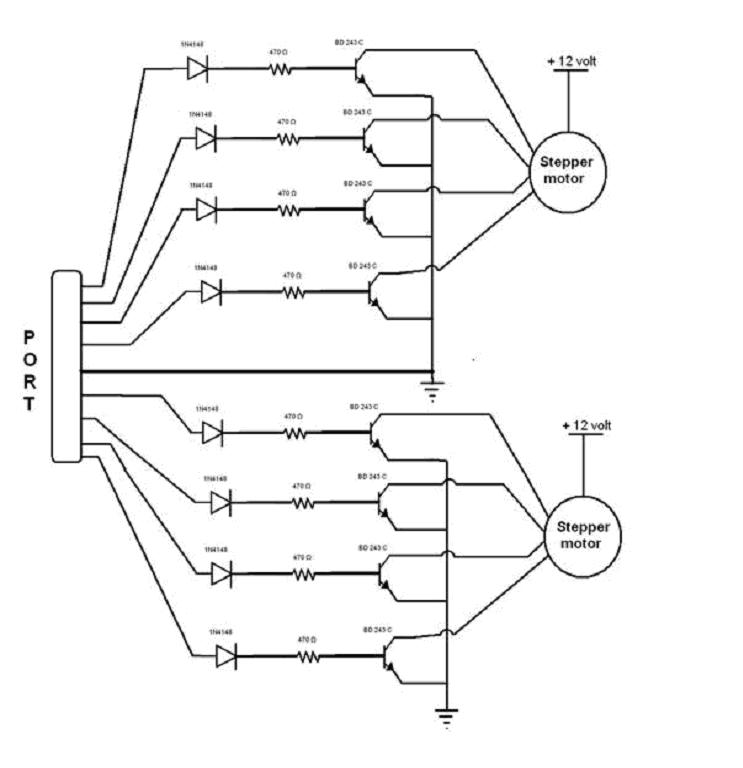
3.4 ELECTRICAL PART
CONTENTS 1. INTRODUCTION 2. SYSTEM DEFINITION 3. SYSTEM DESIGN 3.1 SOFTWARE PART 3.1.1 VIDEO CONTROL 3.1.2 PARALLEL PORT CONTROL 3.2 MECHANIC PART 3.3 ELECTRONIC PART 4. ASSEMBLING THE SYSTEM PARTS 5. CONCLUSION 6. REFERENCES
1. INTRODUCTION This project aims to control a two directional mechanical arm on which a web cam is assembled by using step motors. The arm will be connected to the parallel port of the computer. The user can move this arm both in vertical and horizontal directions by using arrow buttons. The restriction on view area of the security cameras becomes invalid. 2. SYSTEM DEFINITION The system should have three parts. First the software parts in which we will get the video frames from the input device that is connected to the USB port and manages the parallel port connections. Second the mechanical part which will contain two motors. One of these is for the horizontal movement and second one is for the vertical movement. And the web cam will be connected to the second one which moves in vertical. And the third part is the electronic part which converts parallel port signals to meaningful electronic signals. 3.SYSTEM DESIGN 3.1 SOFTWARE PART Software part contains two controls; video and the parallel port controls. The details of these parts are explained below. 3.1.1 VIDEO CONTROL In this part we developed a simple video player which first detects the installed video capture device, and then connects to this device and get the video frames to perform some custom processes on media data streams to show the media frames in the video panel. We used Java Media Framework (JMF) which is an application programming interface (API) for incorporating media data such as audio and video into Java applications. It is specifically designed to take advantage of Java platform features [1]. 3.1.2 PARALLEL PORT CONTROL LPT ports on the Microsoft operating systems are protected against program access to the computer's device input/output registers. To override this protection I used a freeware program USERPORT [2]. After achieving this problem we read and write bytes through parallel printer ports. 3.2 MECHANIC PART Mechanic part contains two step motors. One for the horizontal movement fig.3.2.a and the other one is for the vertical movement fig.3.2.b. I assembled these step motors with a plastic material with the help of a havya fig.3.2.c 3.3 ELECTRONIC PART 3.4 ELECTRICAL PART
yeni mesaja git
Yeni mesajları sizin için sürekli kontrol ediyoruz, bir mesaj yazılırsa otomatik yükleyeceğiz.Bir Daha Gösterme



 Yeni Kayıt
Yeni Kayıt








 Konudaki Resimler
Konudaki Resimler